Rear collision avoidance system
Introduction
This rear collision avoidance system addresses the problem of a car that moving fast corresponedly to the current vehicle speed and can occur rear-end collision , that is usually not controlled by the current vehicle driver. the system helping to alert the driver by allowing him a short time to respond accordingly. The system can be similar to anti collision systems like : "Mobileye" or "AWACS" system that are doing the same thing but responsible only for the front side of the vehicle.
Description:
Rear collision avoidance system for electric folding vehicle.
The system contains hardware components: optical sensors (mid range LIDAR , HDR camera ) and GPS.
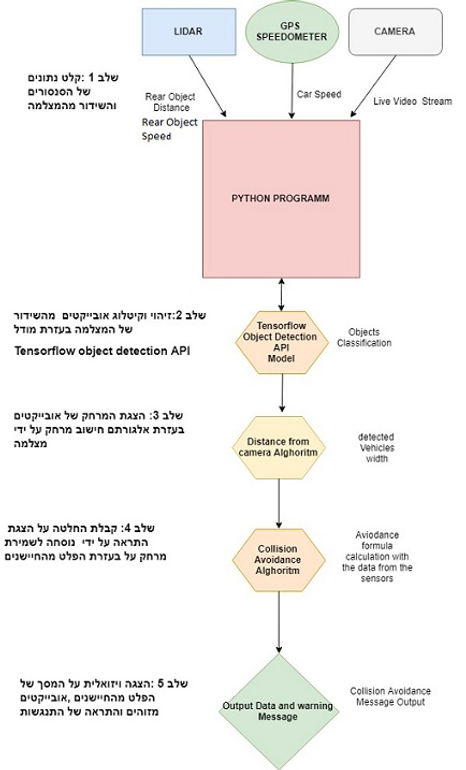
the components are integrated with embedded Microcontroller boards (Arduino) that sending the data from the sensors (car speed,rear car distance,rear car speed) in a real time to a software in Python with TensorFlow and OpenCV libraries is detecting the moving vehicle behind . In the final stage additional algorithms are analyzing the data and giving a warning when a vehicle behind is getting close enough with a chance of collision.
System Diagram:
Hardware:
ELP HDR camera
GPS module NEO-6M ublox


GPS antena

GARMIN LIDAR Lite -V3

ARDUINO UNO
Microcontrollers
DELL mini PC Optiplex 3050 mirco

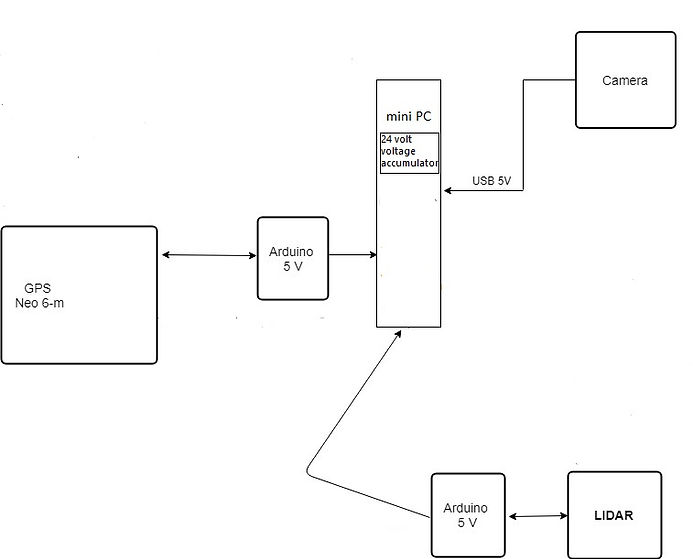
Power supply diagram:
Software
Integration Between Arduino and PYTHON code


System Exemination
first we installed the hardware of the system on a private vehicle ,to see how it works on urban road and on an inter urban road .

the first attempt to power the system. the system was running well but the sensor data was not enough accurate.


The second attempt to power the system on the urban road and the highway,
the calibration of the camera and the sensors , made the system finally work as expected,
giving a warning when vehicle behind is close enough.
Assembly
Assembly the system components on the Electric Folding vehicle
.jpg)

The vehicle


Conclusion
The system works reasonably well in real time , however it needs a powerful computer with strong graphics processor Suitable for CUDA and TENSORFLOW GPU to work in a steady state without any delays ,simple laptop or mini PC won't be enough.
The project was chosen to be among the outstanding projects of the year in the Department of Mechanical and Mechatronics engineering at Ariel University with a score of 100 .
Credits
Prof. Dov Oster - Project Supervisor
Ido finkelshtein ,Daniel Luzon - Partners